筑波大学 計算科学研究センター
Ja
En
ナビゲーション切替
ホーム
日本語
English
研究室紹介
メンバー
研究成果
特集記事
ニュース
研究室の場所・アクセス
お問い合わせ
各種情報
スケジュール
宇宙フォーラム
コロキウム
研究会
カレンダー
筑波大学カレンダー
研究室内部ページ
内部用ウィキ
R1スケジュラー
CCS 内部ページ
FAIR 財務会計システム
プロジェクト
宇宙物理研究
HPC プロジェクト
コード開発
宇宙生命計算科学
計算メディカルサイエンス
過去のプロジェクト
大学院入学案内
宇宙物理理論研究室
数理物質科学研究科
筑波大学
出身者一覧
リンク
筑波大学
計算科学研究センター
↳ 研究室トップページ
数理物質科学研究科
↳ 物理専攻
↳ 数理物質融合科学センター
宇宙観測研究室
日本天文学会
リソース
Read in English
お問い合わせ
研究室の場所・アクセス
検索
研究成果・発表論文
研究室紹介
研究成果
平成24年度
研究成果・発表論文...
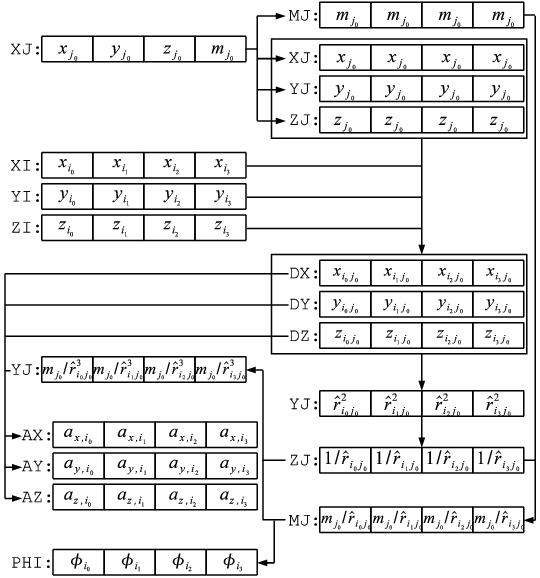
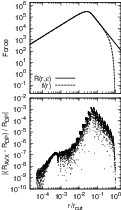
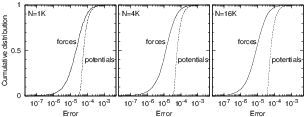
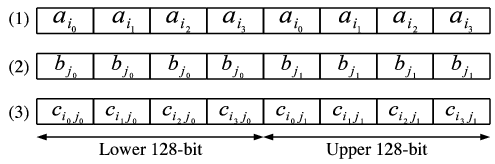
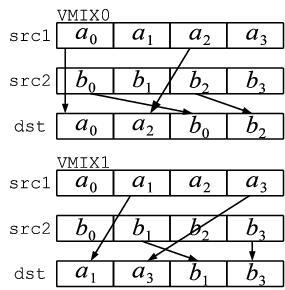
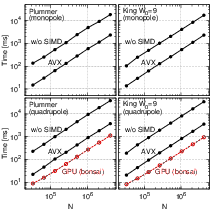
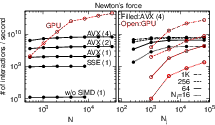
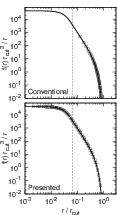
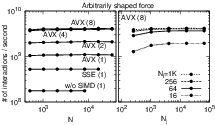
Phantom-GRAPE: Numerical software library to accelerate collisionless N-body simulation with SIMD instruction set on x86 architecture
Tanikawa, Ataru, Yoshikawa, Kohji, Nitadori, Keigo, & Okamoto, Takashi
要旨



 Ja En
Ja En